

Publications
Journal Publications

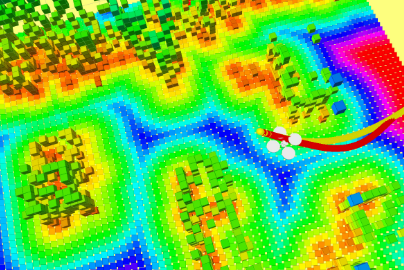
RAPTOR: Robust and Perception-aware Trajectory Replanning for Quadrotor Fast Flight,
Boyu Zhou,, Jie Pan, Fei Gao and Shaojie Shen, IEEE Transactions on Robotics
(T-RO 2021)
[Paper]
[Video]
[Code]
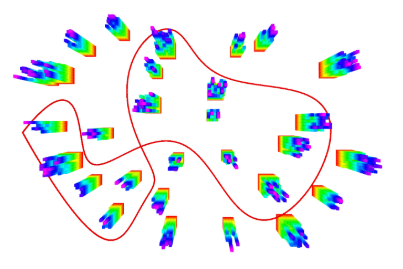
FUEL: Fast UAV Exploration using Incremental Frontier Structure and Hierarchical
Planning, Boyu Zhou, Yichen Zhang, Xinyi Chen, Shaojie Shen, IEEE Robotics
and Automation Letters (RA-L) with ICRA 2021 option
[Paper]
[Video]
[Code]
Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight,
Boyu Zhou,
Fei Gao, Luqi Wang, Chuhao Liu, Shaojie Shen, IEEE Robotics and Automation Letters (RA-L) 2019,
presented at IROS 2019
[Paper]
[Video]
[Code]
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex
Environments, Fei Gao, Luqi Wang*, Boyu Zhou*, Xin Zhou, Jie Pan, Shaojie
Shen, IEEE Transactions on Robotics (T-RO 2020) (* for equal contribution)
[Paper]
[Video]
[Code]

Optimal Trajectory Generation for Quadrotor Teach-and-Repeat,
Fei Gao, Luqi Wang, Kaixuan Wang, William Wu, Boyu Zhou, Luxin Han, Shaojie Shen,
IEEE Robotics and Automation Letters (RA-L), presented at ICRA 2019
[Paper]
[Video]
[Code]
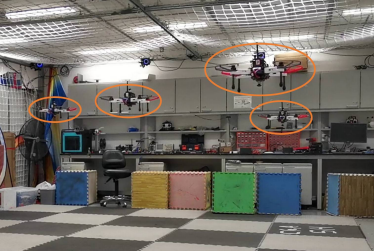
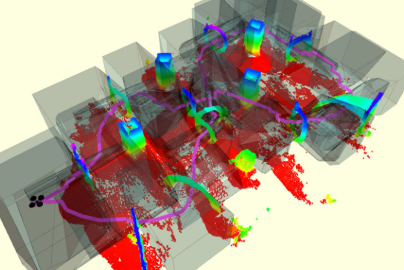
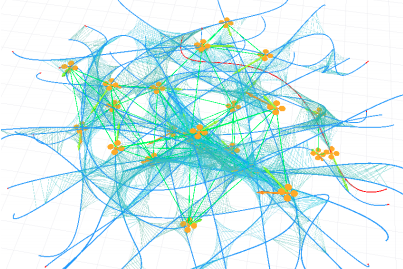
Omni-swarm: An Aerial Swarm System with Decentralized Omni-directional Visual-Inertial-UWB State Estimation,
Hao Xu, Yichen Zhang, Boyu Zhou, Luqi Wang, Shaojie Shen,
IEEE Transactions on Robotics (T-RO 2022)
[Paper]
[Video]
[Code]
Conference Publications
Robust Real-time UAV Replanning Using Guided Gradient-based Optimization and Topological
Paths, Boyu Zhou, Fei Gao, Jie Pan, Shaojie Shen, 2020 International
Conference on Robotics and Automation (ICRA 2020)
[Paper]
[Video]
[Code]
Fast Sparse 3D Topological Skeleton Generation for Global Planning, Xinyi Chen, Boyu Zhou, Jiarong Lin, Fu Zhang and Shaojie Shen, International Conference on Intelligent Robots and Systems (IROS 2022) (corresponding author)
[Paper]
[Video]
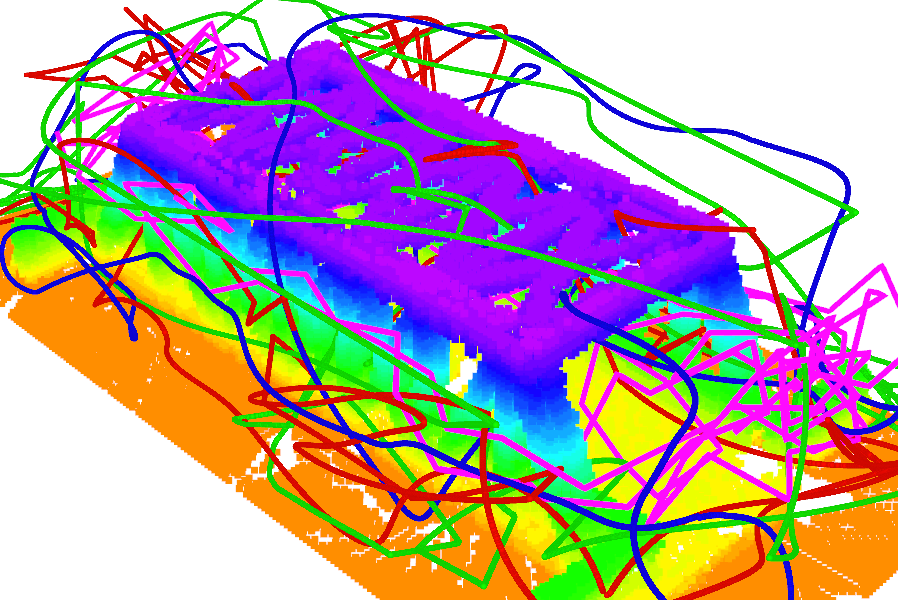
Exploration with Global Consistency Using Real-Time Re-integration and Active Loop Closure, Yichen Zhang, Boyu Zhou*, Luqi Wang, Shaojie Shen, International Conference on Robotics and Automation (ICRA 2022) (corresponding author)
[Paper]
[Video]
[Code]
Estimation and Adaption of Indoor Ego Airflow Disturbance with Application to Quadrotor Trajectory Planning, Luqi Wang, Boyu Zhou, Chuhao Liu, Shaojie Shen, International Conference on Robotics and Automation (ICRA 2021)
[Paper]
[Video]
FIESTA: Fast Incremental Euclidean Distance Fields for Online Motion Planning of Aerial
Robots,
Luxin Han, Fei Gao, Boyu Zhou, Shaojie Shen, 2019 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS 2019)
[Paper]
[Video]
[Code]
Optimal Time Allocation for Quadrotor Trajectory Generation,
Fei Gao, William Wu, Jie Pan, Boyu Zhou, Shaojie Shen,
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018)
[Paper]
[Video]
[Code]
Temporal Scheduling and Optimization for Multi-MAV Planning,
William Wu, Fei Gao, Luqi Wang, Boyu Zhou, Shaojie Shen, International Symposium on
Robotics Research (ISRR 2019)
[Paper]
[Video]
